

Neste Lab trabalharemos na montagem de um aplicativo para Android, utilizando o MIT App Inventor 2, em conjunto com um módulo Bluetooth para enviar os valores de controle do ângulo de disparo dos Triac’s para o Arduino a uma distância de até 10m.
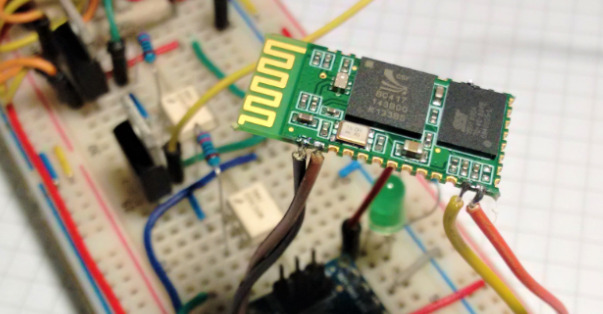
Imagem detalhe do módulo Bluetooth
Montagem do aplicativo
O aplicativo elaborado para este Lab foi criado utilizando a ferramenta criada pela Google e agora mantida pelo MIT denominada MIT App Inventor 2. Este baseia-se em um método de “programação ” utilizando a montagem de blocos, semelhante a linguagem Scratch, onde mesmo que o usuário não saiba métodos de programação, tendo conhecimento mínimo de lógica, é possível a elaboração de aplicativos interessantes e funcionais como o utilizado neste Lab. Uma imagem da construção da interface deste aplicativo pode ser observada abaixo.
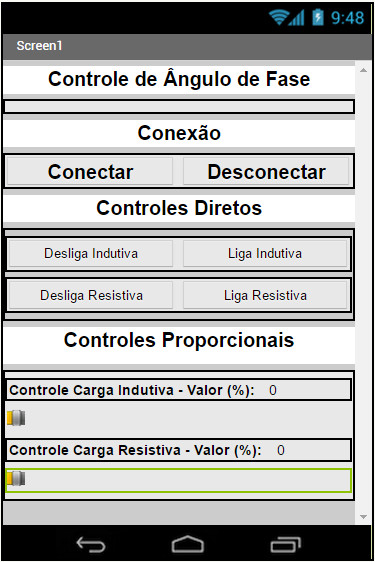
Imagem da interface do aplicativo
Outras empresas como a National Instruments com o LabVIEW e a MathWorks com o Simulink também utilizam o método de montagem de blocos que garante funcionalidade a sistemas complexos de supervisão de processos e variáveis industrias e até mesmo a simulação de sistemas que envolvam vidas humanas como o controle de estabilidade de automóveis e aviões.
Os arquivos .apk do aplicativo e o .aia, que contém a montagem da interface do aplicativo e os blocos, estão no link subsequente.
O vídeo abaixo explica passo a passo a montagem e teste deste aplicativo com o circuito de controle.
Algoritmo e testes
O algoritmo utilizado nesta segunda parte sofreu uma pequena modificação na função onde o valor de comparação do timer é passado aos registradores OCR2A e OCR1A. A função map() foi utilizada para inverter a ordem dos valores enviados ao Arduino pois um valor muito pequeno, supondo 5, faz com que a contagem do timer seja muito rápida e o pulso de disparo enviado ao Triac aconteça com maior frequência e, consequentemente, entregando uma maior porção de potência a carga.
Do ponto de vista do usuário, enviar um valor pequeno ao registrador de comparação para se ter uma grande potência entregue não faz muito sentido. Desta forma, o aplicativo envia valores entre 0 e 100, em uma escala de %, e a função map() equaliza estes valores proporcionalmente aos valores de comparação do timer que são de 0 e 505 para a carga indutiva e 0 a 122 para a carga resistiva.
Logo, a modificação do algoritmo do Lab11 deve ser feita apenas nas duas funções indicadas abaixo.
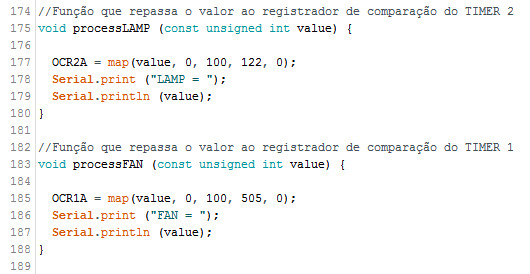
Modificação no algoritmo doLab 11
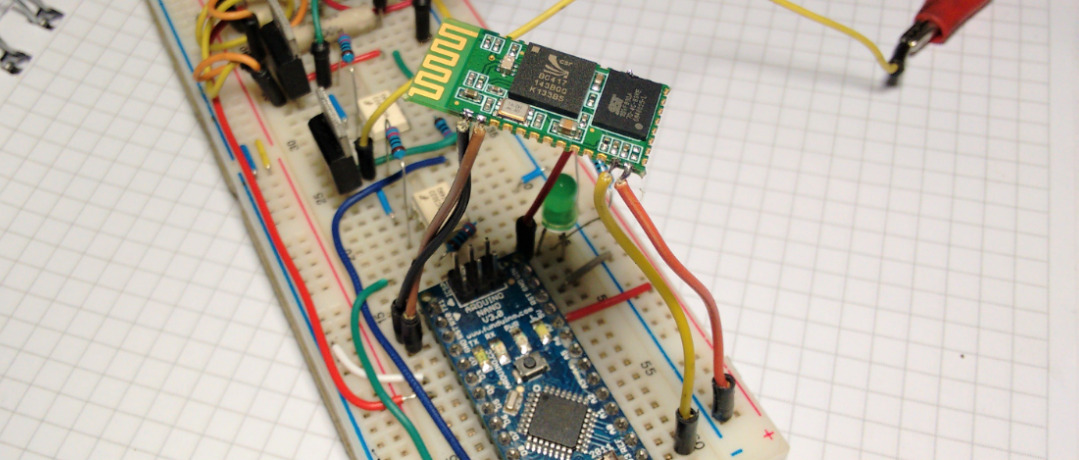
O novo diagrama de montagem, agora acrescentando o módulo Bluetooth, está indicado abaixo.
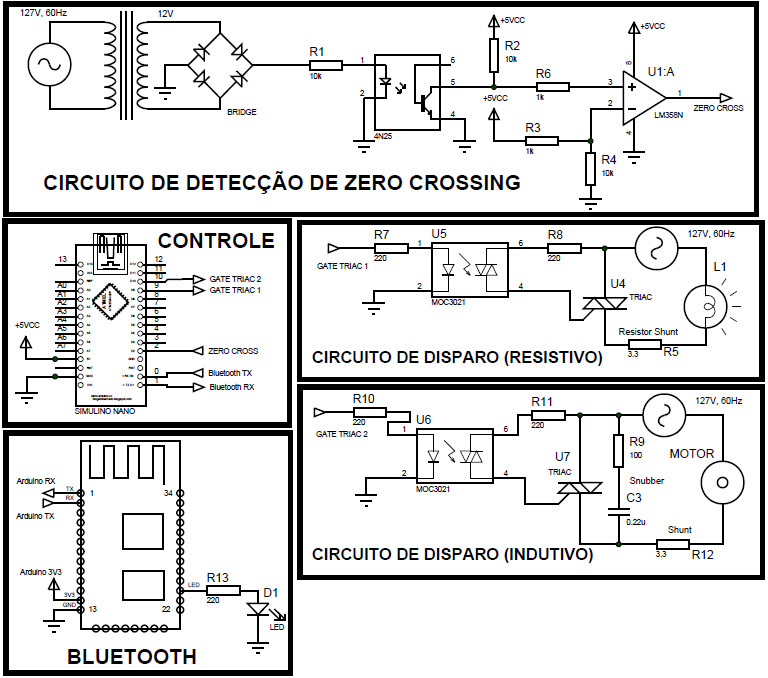
Diagrama de ligação Lab 12
De acordo com o datasheet do controlador Bluetooth HC05, mesmo que o módulo seja alimentado em 3V3, os níveis de tensão para a comunicação serial entre o módulo e o Arduino são TTL, ou seja, suportam no máximo 5V. Dessa forma, não foi preciso a montagem de um shift level entre o Bluetooth e o Arduino. Uma imagem com a descrição dos pinos está indicada abaixo.
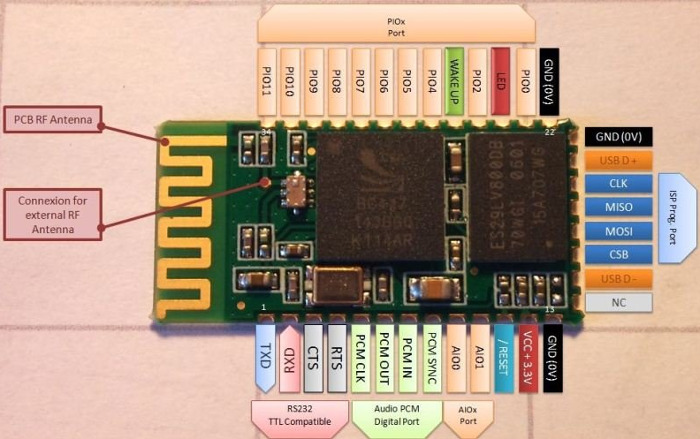
Pinout do módulo Bluetooth
O módulo utilizado apresenta uma construção básica e não contém os pinos de conexão com uma protoboard. Uma imagem com os terminais de ligação e um detalhe amplo do esquema estão indicados abaixo.
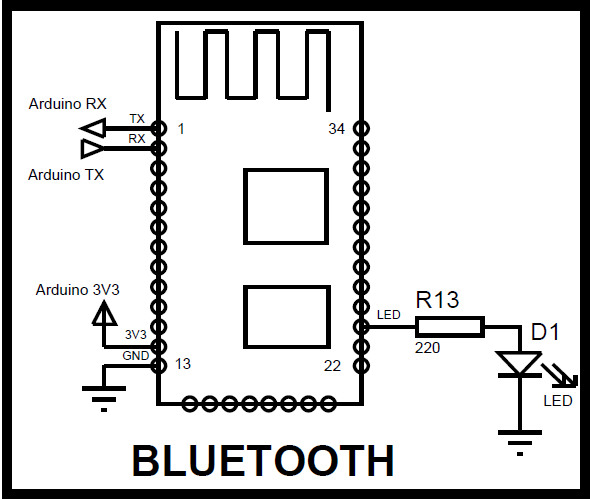
Detalhe esquema Bluetooth
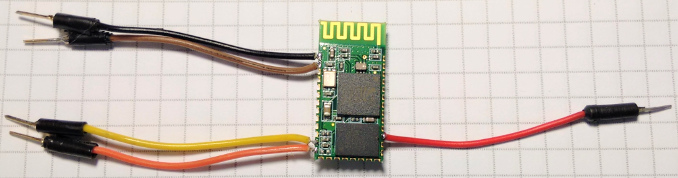
Imagem módulo Bluetooth
Conclusão
Neste Lab nós finalizamos o entendimento e o projeto do protótipo para o controle de ângulo de fase de duas cargas típicas industriais. O aplicativo foi elaborado utilizando uma ferramenta gratuita, funcional e de fácil entendimento, porém, relativamente poderosa. Dessa forma, o controle das cargas agora pode ser feito a distância utilizando-se um Smart Phone ou outro dispositivo, com tecnologia Android, encontrado no mercado e que possua Bluetooth para a conectividade à novas aplicações.

01/09/2023 at 03:55
verygood the website i like it so much
gostei muito do seu site parabéns
21/08/2021 at 11:05
Muito bem elaborado este projeto.
Informo que os links dos arquivos .apk e do arquivo .aia estão quebrados, solicito, se possível, uma nova disponibilização dos mesmos, sendo estes uma preciosa fonte para outros projetos.
Solicito também que me avise sobre a correção dos mesmos.
Parabéns pela qualidade deste projeto.
11/11/2021 at 09:46
Olá Reinaldo.
Desculpe pela demora na resposta. Criei um repositório definitivo para este projeto no github.
https://github.com/Eduardo-Avelar/Arduino-Lab-12-EasytromLabs
Espero ter ajudado.
Até mais!
06/05/2018 at 22:39
Olá amigo Parabéns pelo projeto, poderia disponibilizar o sketch do arduino?
06/05/2018 at 22:47
Olá David,
Talvez não tenha percebido mais este tutorial é a segunda parte de um outro tutorial “Arduino Lab 11” https://wp.me/p7gkxB-an.
A segunda parte, onde você comenta, contempla apenas a melhoria de um comando via bluetooth.
Voce vai encontrar toda a documentação necessária no Arduino Lab 11 e no Arduino Lab 12 para construir este projeto.
Espero ter ajudado.
Att.
Eduardo Avelar